Como trabalhar horas
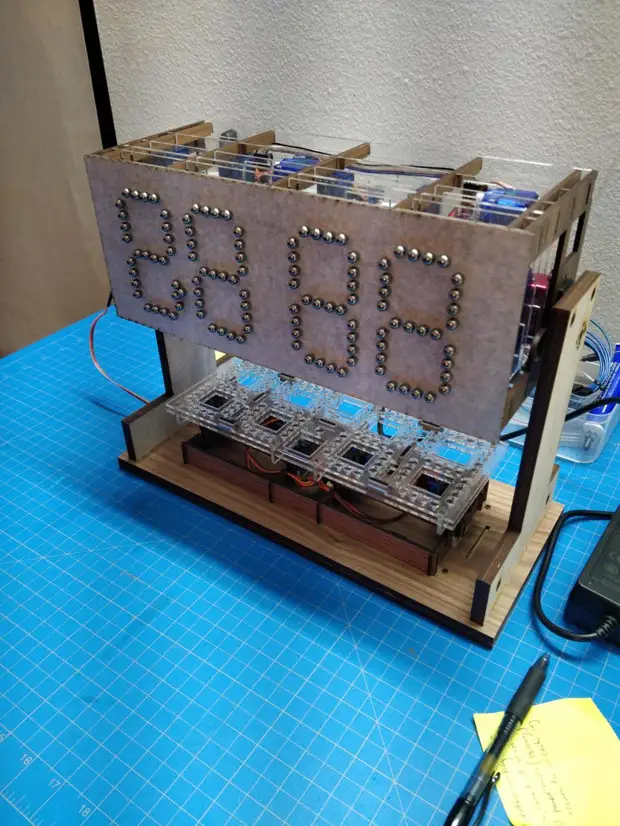
Eu finalmente decidi lidar com Arduino, como resultado de que fiz meu primeiro projeto: relógio digital totalmente mecânico.

Componentes
Eletrônicos:- (1) Arduino Nano.
- (2) PCA9685, 16 canais de 12 bits PWM servomotor drivers.
- (1) DS3231, relógio de tempo real (RTC).
- (1) TTP223B, interruptor de toque.
- (33) Servomotor SG90.
- (2) 20kg servomotores poderosos.
- (1) interruptor de sinal de verão.
- (1) fonte de alimentação 12V 6a.
Materiais:
- Madeira compensada de noz 3 mm.
- Folheado porca.
- Plexiglas 3 mm.
- Fio de aço carbono.
- Parafusos.
- Imãs permanentes.
- Bolas de metal 6 mm.
Equipamento:
- GlowForge de cortador a laser.
- Ferramentas diferentes.
Etapa 1: esquema e código
Diagrama esquemático do dispositivo é bem simples. Tudo se conecta com tudo através dos contatos SDA, SCL, Terra e V +.
O código como um todo funciona nos seguintes princípios:
- Cada motor é controlado por uma ou duas placas PCA9685. Cada dígito tem 7 segmentos - apresenta 14 servomotores por horas e 14 por minutos. Há dois motores mais poderosos que giram o alojamento, 4 aumentando a plataforma e 1 para o cólon.
- O tempo é retirado do chip em tempo real.
- Eu liguei um interruptor de toque no circuito para poder alternar os formatos de relógio (12/24 horas).
Etapa 2: prototipagem

Números e números
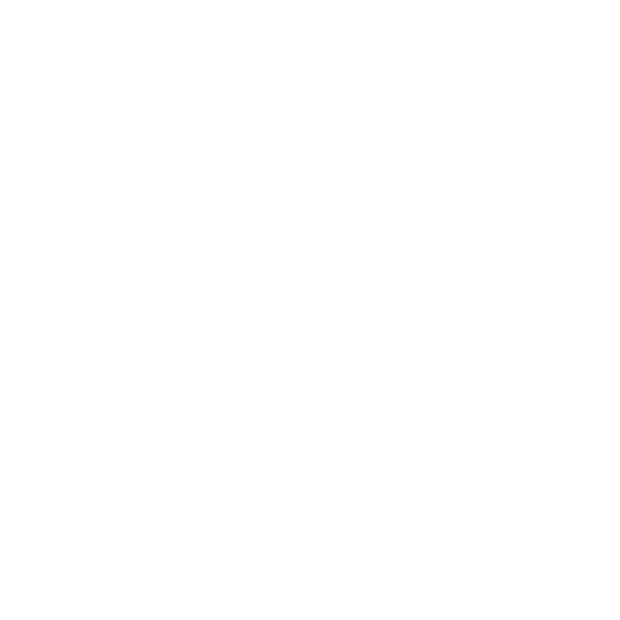
Cada número tem 7 segmentos. Cada segmento é controlado por um servo. Uma das tarefas mais difíceis era colocar os servomotores de modo a minimizar o tamanho total do relógio. Ajudou o design no computador.Eu comecei com a única figura. A foto mostra as faixas no mecanismo de elevação para as quais as bolas devem ser movidas no plano inicial. Além disso, eu queria, ao mudar a hora atual, todas as bolas primeiro caíram - mas tal sistema era muito complicado. E bem, porque o relógio e agora funcionam é bastante alto - e a cada minuto que caem centenas de bolas certamente estará muito começando a incomodar.
Etapa 3: Design
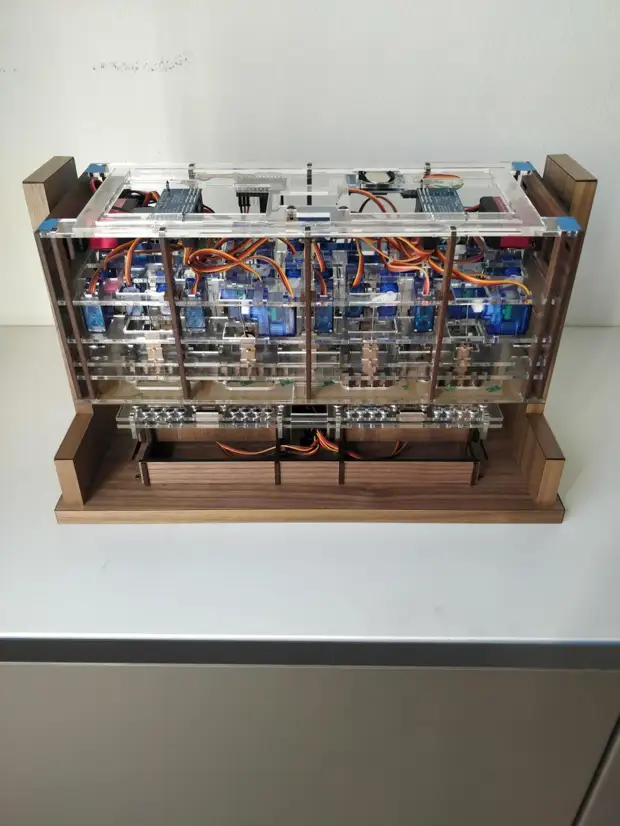

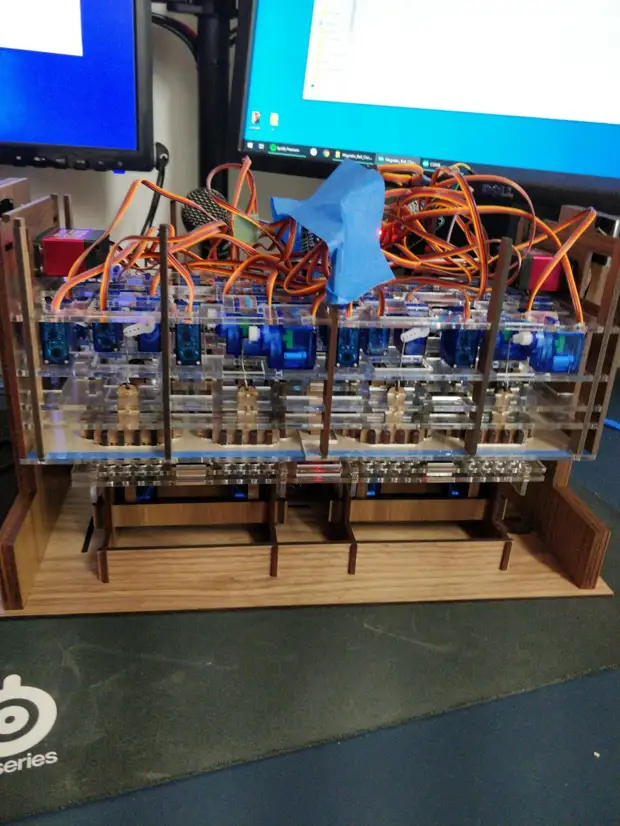
Topo da caixa
Servomotores estão conectados a conectar fios. Em um fio, ele vai para cada um dos segmentos de números, e cada segmento tem quatro ímãs. Você só precisa repetir tudo isso 28 vezes.A primeira camada é ímãs, o segundo detém os servomotores, a terceira eletrônica e, em seguida, a parede traseira vai. Sim, talvez o layout acabasse por ser muito apertado - o que fazer.
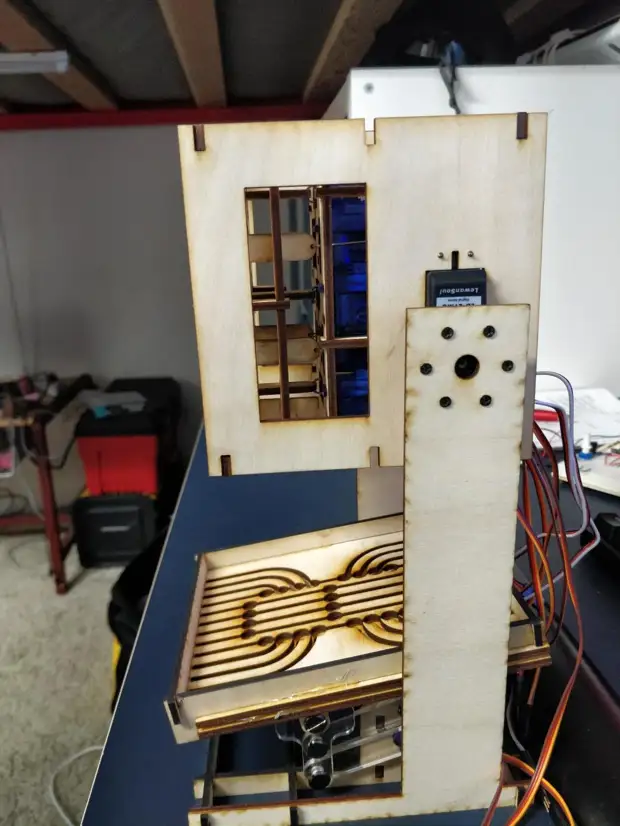
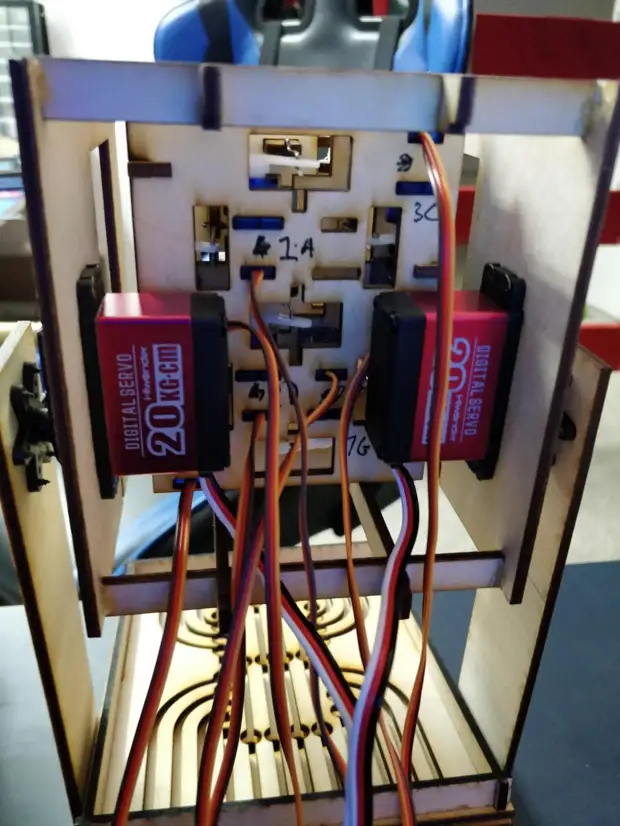
Nas paredes laterais, dois motores de 20 kg são fixos, girando todo o corpo para carregar e descarregar as bolas. By the way, no futuro não usarei materiais diferentes para um projeto. Eu queria o relógio principalmente transparente, com um pequeno acabamento de madeira. Trabalhar com materiais de espessura diferente, que também obtém espessura diferente do corte no cortador a laser, foi muito difícil.
Mecanismo de levantamento (parte inferior)
O mecanismo de elevação tem 4 motores para ajudar a aumentar e reduzir a plataforma onde as bolas de aço são construídas sob os segmentos de números. O aumento é realizado por meio de uma simples transmissão.
Pernas
Alimentado por 12 V é alimentado através da parte inferior do alojamento. Eu consegui esconder os fios bem em uma das pernas, para que os fios não estejam presos lá.Etapa 4: cursos de acabamento


Projetando horas, eu constantemente me lembrei da necessidade de fazer um design duplo. Uma das opções do relógio parece ser inteiramente feita de madeira. E se você remover estes revestimentos, poderá ver o interior e a operação do mecanismo. Agora eu entendo que eles gostam mais de mim com sobreposições, no entanto, e sem eles, o projeto parece muito legal.