Bagaimana pula dengan membuat pengumpan untuk membuat tangan anda sendiri? Tetapi pengumpan tidak mudah, tetapi ... baik, secara umum, ia tidak mudah.


Mungkin diperlukan
Set 12 chisers untuk benang kayu (aliexpress)
DIY ditetapkan untuk membuat jam elektronik (AliExpress
Alat yang cukup berkualiti tinggi untuk menghapuskan penebat dengan wayar (AliExpress)
Kunci Elektronik RC-522 untuk Arduino (AliExpress)
Filem karbon (AliExpress)
Kadang-kadang ia berlaku bahawa orang tidak kira bagaimana sebabnya perlu untuk meninggalkan rumah mereka untuk seketika. Sementara itu, haiwan kesayangan kekal di rumah dengan menjangkakan pemulangan pemiliknya. Tetapi mereka perlu memberi makan, dan ia menjadi masalah.
Alexgyver Master-Homeman (YouTube Channel "Alexgyver), datang dari bahan yang ada, secara literal dari barang-barang rumah, serta dari komponen elektronik kos rendah dengan AliExpress untuk membuat pengumpan automatik yang sejuk, yang akan memudahkan tugas kepada mereka yang akan Kadang-kadang pergi untuk melawat anda dan lawati haiwan kesayangan anda.
Pada mulanya, penulis ingin mencetak pengumpan untuk pencetak 3D dan membuat sistem kawalannya untuknya, kerana semua yang ditemui pada unstashes di World Wide Web, tetapi kemudiannya diputuskan untuk membuat pangkalan pengumpan dari Santeh .
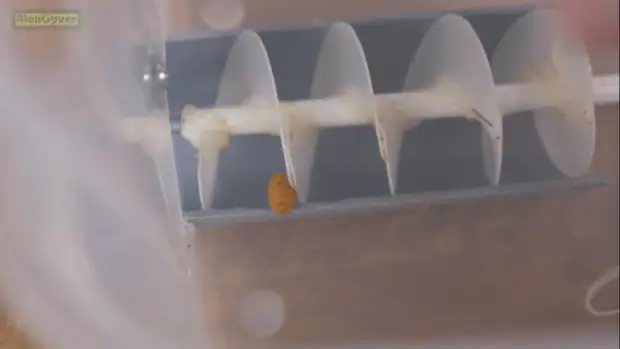
Kami akan melakukan pengumpan dengan seorang bunker, suapan dari yang dihidangkan dengan bantuan teknologi kuno - skru Archimedian, atau Auger, kerana ia dipanggil dalam masa kita. Pembinaan itu dirancang kira-kira itu, sesuatu seperti penggiling daging :

Tetapi bereksperimen dengan suapan suapan skru, pengarang menghadapi beberapa masalah yang membawa kepada kesesakan yang kuat dalam reka bentuk jenis ini. Oleh itu, reka bentuk dengan skru terbuka dipilih.
Setelah menghabiskan masa tertentu mengenai pelbagai jenis eksperimen, penulis datang kepada kesimpulan berikut:
1. Jika auger berada di dalam bunker, maka ia mesti terletak di bahagian bawah paip diameter yang sama, jika tidak, dengan kebarangkalian 100%, menggalakkan kepingan sisi.
2. Auger mestilah lancar, jika tidak, kesesakan jenis ini boleh berlaku.
3. Akhir belakang mesti ditutup, jika tidak, hujung Auger sekali lagi menggalakkan.
4. Jika auger adalah satu tangan, maka antara akhir dan output dari bunker harus menjadi jarak yang lebih besar daripada saiz zarah terbesar makanan.
5. Akhir depan mesti diikat dalam arah radial, jika tidak, semuanya akan terjebak.
Untuk mengulangi projek ini, anda perlu:
- Kotak dari Fixprass;
- Paip pembetung ke-50;
- Untuk pembuatan Auger akan memerlukan tiub PVC dengan diameter 7 mm dan folder keras untuk kertas atau mana-mana plastik nipis yang lain;
- Pengekod;
- Arduino Nano;
- Motor Cina dengan kotak gear;
- memandu untuk mengawal motor;
- Butang untuk kawalan;
- Pengecas dari telefon pintar.
Perkara pertama yang kami potong bulatan dengan diameter 48 mm. Kami akan memerlukan 4 keping bulatan tersebut.
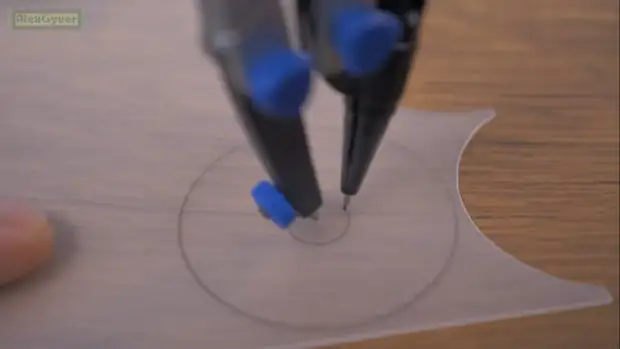
Di tengah-tengah butiran yang dihasilkan adalah perlu untuk membuat lubang dengan diameter 10 mm. Semua dimensi diperolehi oleh percubaan dan kesilapan.
Panaskan plastik kosong menggunakan lebih ringan dan kami membuat giliran. Ini akan membantu kami dalam perhimpunan selanjutnya.

Gam pada tahap ini tidak akan digunakan, sambungkan gegelung dengan stapler. Pada masa akan datang, usaha pembinaan.

Seterusnya, kami membersihkan dan merosot permukaan, dan kami merebut hujung depan dengan bantuan senjata termoklaural, dan kemudian belakang, pra-mengetatkan Helix. Gam sememangnya bukan makanan, tetapi sebagai penulis menjamin, pasti tidak toksik.

Kemudian potong cincin sedikit saiz yang lebih kecil dan tongkat dari belakang. Semua menyelaraskan dan menghilangkan langkah-langkah di seluruh permukaan depan.
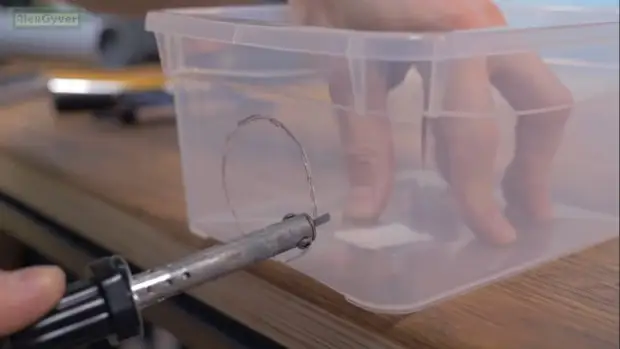
Segala-galanya, Auger bersedia, maka kami akan bekerjasama dengan paip. Dari itu kita akan menghasilkan sebuah bunker. Perkara pertama dalam bunker masa depan perlu membuat lubang.
Seterusnya, milimeter berundur 5 dari tepi bunker dan buat markup berikut:
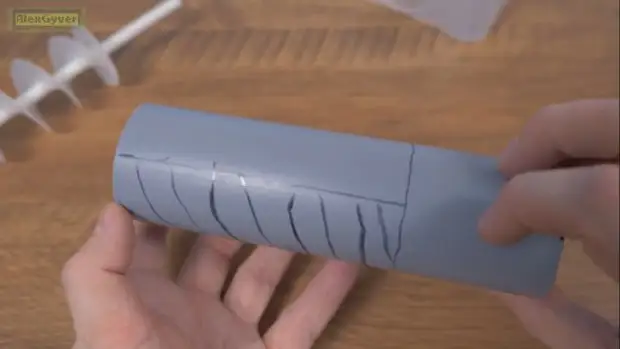
Sekeping ini perlu ditebang. Auger akan didorong dengan cara motor Cina dengan kotak gear:

Melekapkan motor akan sedekat mungkin hingga satu abad, kerana terdapat sedikit ruang di bunker. Perlahan-lahan menggabungkan auger dengan aci, ringan plastik yang dipanaskan.

Sebenarnya, paip mengambil bentuk aci. Anda boleh memanaskan dan mengkonfigurasi penjajaran.
Langkah seterusnya dalam paip mesti dipotong di bawah motor.

Klip besar akan berfungsi sebagai sokongan anterior.

Nah, sesuatu seperti ini. Hampir bersedia mekanisme pemakanan kami, dan yang paling penting, pada peringkat ini, anda boleh memastikan prestasi penuhnya.

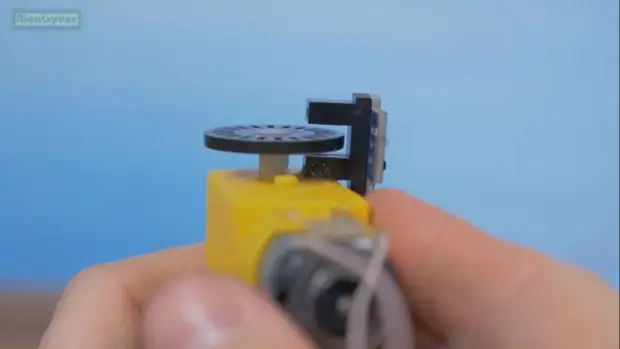
Sekarang mari kita beralih ke bahagian elektronik. Aci dua sisi diperlukan untuk mendapatkan pengekod di atasnya.
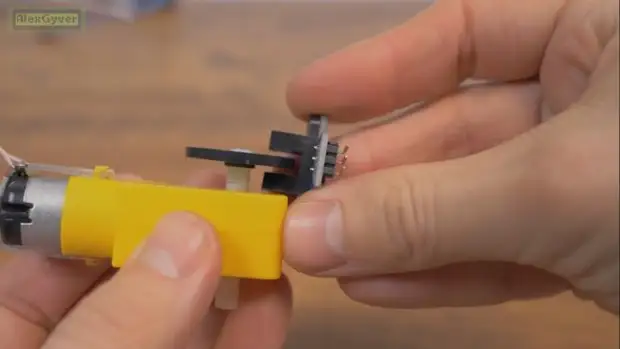
Pengekod akan membolehkan anda mengikuti twist aci, iaitu, skru, yang akan menjadikannya sangat tepat untuk doskan bahagian makanan. Ia juga akan memungkinkan untuk memantau kelajuan putaran aci dan mengangkat voltan pada motor jika beban pada auger adalah besar dan perolehan. Oleh itu, kita dapat dilindungi dari jamming mekanisme, iaitu, ia adalah yang paling takut dalam pengumpan automatik.
Mengurus keseluruhan sistem akan menjadi platform Arduino Nano.
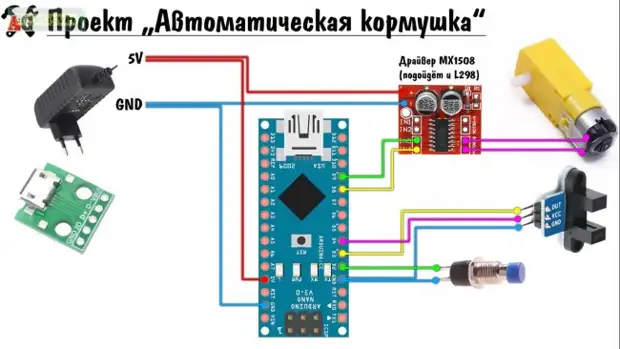
Anda memerlukan pemandu untuk mengawal motor. Pada dasarnya, ia agak mungkin untuk dilakukan tanpa transistor, tetapi untuk satu mod yang agak menarik kita perlu menghidupkan motor dalam arah yang bertentangan, dan untuk ini anda sudah memerlukan pemandu.
Skim sambungan kelihatan seperti ini:
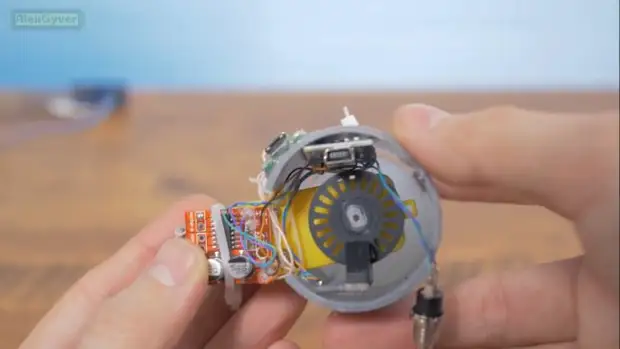
Kami mula memasang. Pengekod diikat pada superclauses. Anda boleh meningkatkan superclay dengan soda. Dengan bantuan pengapit dengan pasti memperbaiki motor.

Kami menyambung komponen elektronik dengan wayar dan Crepim pada paip.
Seterusnya, sambungkan Arduino ke komputer, pergi ke halaman projek dan swing firmware.

Kemudian buka fail firmware, dan kami melihat tetapan. Lihat lebih banyak di asal Video Pengarang:
Selepas menetapkan tetapan, klik butang "Muat turun" dan kod dimuatkan ke dalam mikrokontroler.
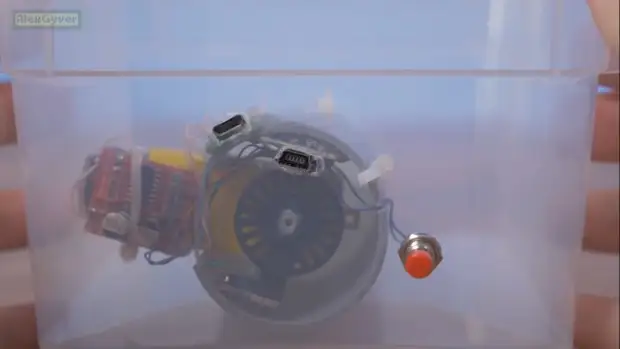
Semua akhirnya diikat dan kami melakukan lubang yang diperlukan di bawah USB mini untuk memuat turun dan Mikro USB untuk kuasa. Meletakkan skim dalam Mini USB Arduino adalah mustahil, kerana motor mungkin memerlukan sehingga 800 ma di bawah beban dan fius akan terbang di papan.
Kami menambah cerun supaya suapan dihasilkan sepenuhnya.

Sekarang tentang bagaimana ia berfungsi. Kami mempunyai butang. Jika anda mengklik padanya - sistem akan terlepas masa menunggu dan memberi sebahagian daripada suapan. Suapan seterusnya akan berlaku secara automatik selepas masa yang ditetapkan dan kemudian dalam bulatan.


Untuk mengkonfigurasi saiz bahagian, klik dan tahan butang. Tahan sehingga keperluan untuk suapan dijaringkan. Selepas butang dikeluarkan, pemasa akan diset semula, dan saiz bahagian yang dipasang akan direkodkan dalam ingatan dan tidak akan dilepaskan apabila reboot.


Seperti yang disebutkan di atas, sistem ini mampu mengawal voltan pada motor bergantung kepada kelajuan putaran, dan jika beban tiba-tiba bertambah - kuasa tinggi dan makanan suapan terus di motor. Juga, projek ini menyediakan untuk mod pengambilan. Sekiranya sistem memahami bahawa kuasa pada motor akan diberikan kepada maksimum, tetapi Auger berdiri di tempat - ia bermakna ia sepenuhnya macet. Sistem ini membuat jangka pendek (masa boleh dikonfigurasikan dalam firmware) jerk vertex dalam arah yang bertentangan, dan kemudian meneruskan pengancing makanan.
Itu sahaja. Terima kasih atas perhatian. Untuk mesyuarat baru!