

ຜູ້ກະຕືລືລົ້ນທີ່ມີຊື່ວ່າ Hans ອອກແບບລະບົບນົກ, ເຊິ່ງສອນນົກໃນການຟື້ນຟູຄວາມຖີ່ໃນສະຫນາມຫຼວງໃນການຕອບແທນ. ທັກສະໃນການຝຶກອົບຮົມສີ່ສິບປະຊຸມແລະເອົາກະເປົາຂວດ. ນົກຕ້ອງໃສ່ຂີ້ເຫຍື້ອທີ່ເລືອກເຂົ້າໃນສະລັອດຕິງສະເພາະ. ໃນການຕອບແທນ, ພວກເຂົາໄດ້ຮັບການປິ່ນປົວທີ່ສະແດງຕົວແຈກພິມທີ່ພິມອອກໃນເຄື່ອງພິມ 3D.
VIGRODATOR ຈາກເຄື່ອງຈັກ Viking ກາຍເປັນຖານສໍາລັບ feeder. ຜູ້ທີ່ຍົກຍ້າຍໄດ້ເພີ່ມສາຍໄຟຂະຫຍາຍຫລາຍຢ່າງໃຫ້ມັນ. ເຄື່ອງຈັກສັ່ນສະເທືອນແມ່ນມໍເຕີ DC ທີ່ງ່າຍດາຍໂດຍ 4,5 V.
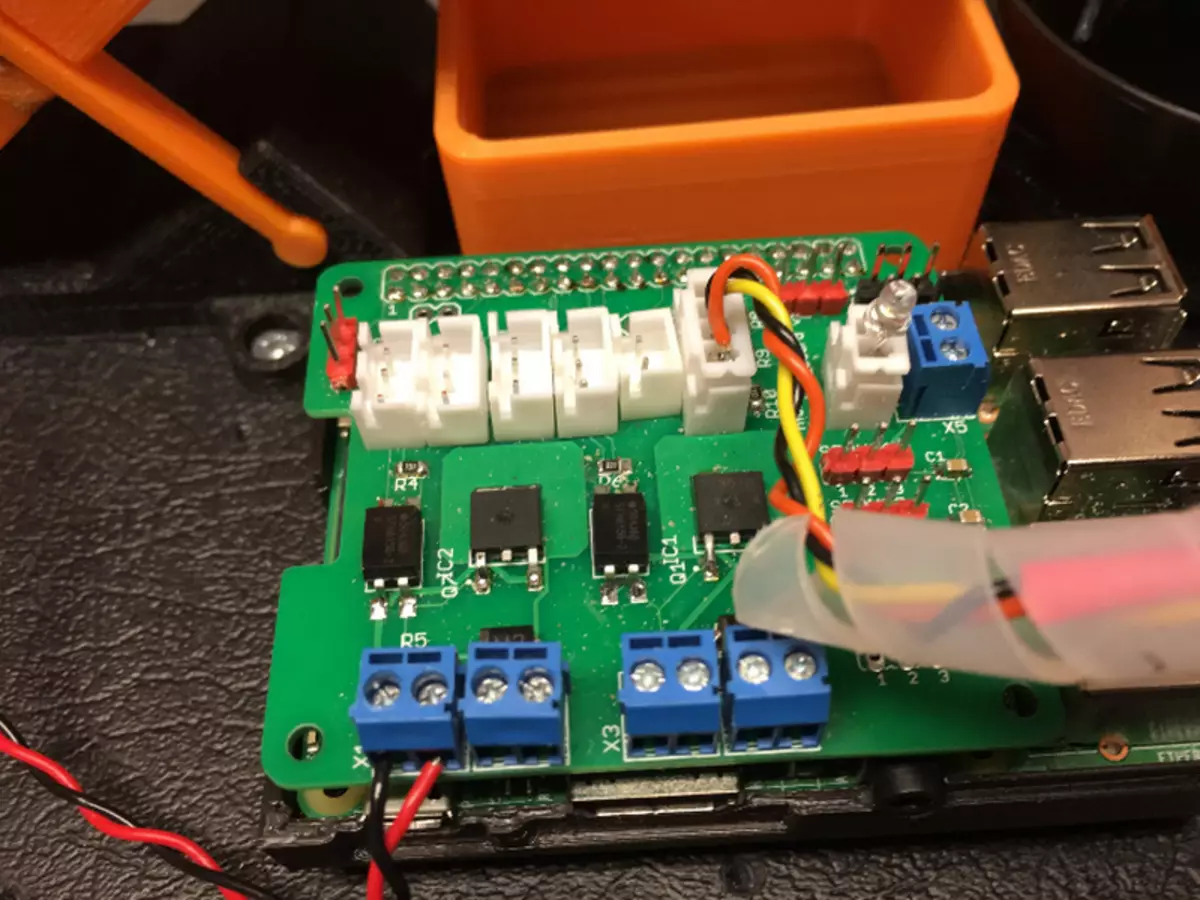
Birdbox ແມ່ນຄວບຄຸມໂດຍ Raspberry Pi 4 ທີ່ມີກະດານເພີ່ມເຕີມ, ເຊິ່ງປະກອບມີຕົວຄວບຄຸມ DC Motor. ໂຄງການໃນ Python ຄວບຄຸມເຫດຜົນຂອງເຄື່ອງປ້ອນ. ຫນ້າທີ່ vnc ຂອງມັນສົມທົບກັບ Auddesk ກັບ Auddesk


Hans ໄດ້ດໍາເນີນການທົດລອງຂອງລາວເປັນເວລາຫລາຍປີ, ແລະໃນເດືອນທີ່ຜ່ານມາລາວໄດ້ຮັບຜົນທີ່ລໍຄອຍມາເປັນເວລາດົນນານ. ລາວໄດ້ແບ່ງປັນຜົນຂອງການເຮັດວຽກໃນວິດີໂອ.
ດຽວນີ້ຜູ້ກະຕືລືລົ້ນຕັ້ງໃຈທີ່ຈະຂະຫຍາຍການກະທໍາຂອງລະບົບ. ໃນແຜນການຂອງລາວທີ່ຈະບັງຄັບໃຫ້ນົກເກັບຫມາກໄມ້ທີ່ລົ້ມລົງແລະສອນພວກເຂົາໃຫ້ຈັດການກັບກະໂປງສວນ.