
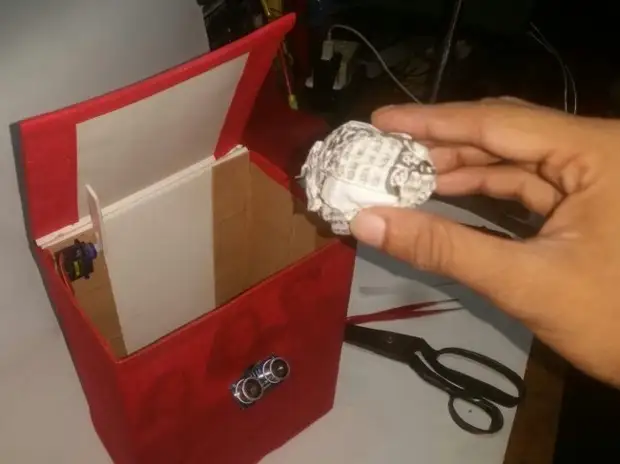
Nick Ashraf_minhajの下でのArduinoプロジェクトハブの著者は、風船や軽いふたの自己ディスプレイを持つ箱の作り方を知らせます。ライセンス - LGPL。
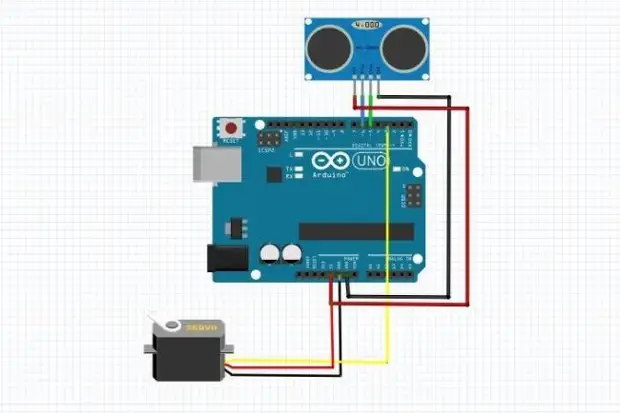
マスターはスキームです。サーボタワーPRO MG996Rは、Arduinoに埋め込まれた安定剤が関与しないように電源を供給されるべきです。
個別にコンポーネント:


マスターはレバーをサーボキットから取ります。

そのような自家製の詳細にそれを貼り付けます:
これをサーボにまとめて設定します。

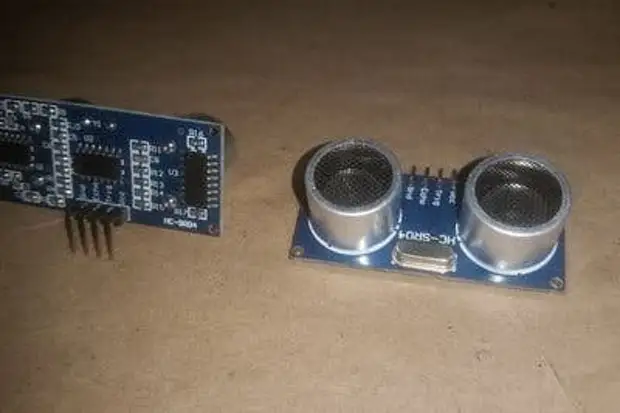
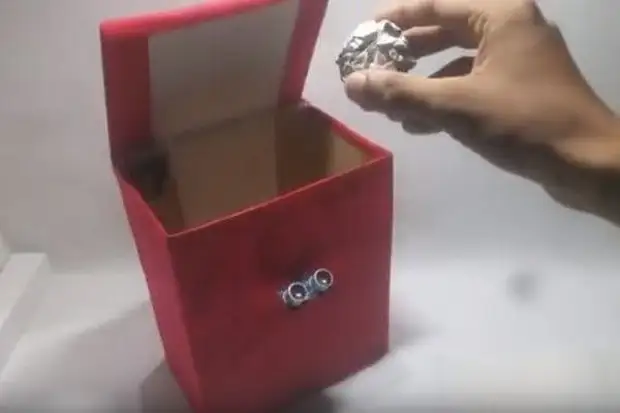
次に範囲Finderを取ります。

以下に示すように、角度で自家製のURNに入れますが、同時に、他のすべてが確立しています。サーボは蓋を開くように配置されます。蓋が雷であると、URNまたは箱の設計は任意である。

開いたふたに対応する位置にあるサーボドライブ:

マスターはショートスケッチ(30行)を埋め、このライブラリを必要とします。
#サーボサーボを含む。 int const trigpin = 6。 int const const enchopin = 5。 void setup(){PINMODE(TRIGPIN、出力); PinMode(エコピン、入力)。 Servo.attach(3); void loop(){int期間、距離。 DigitalWrite(Trigpin、High);遅延(1); DigitalWrite(Trigpin、Low); //エコーピンデュレーション= PULESIN(エコピン、ハイ)のパルス入力を測定します。 //距離は29.1(データシートから)距離=(継続時間/ 2)/ 29.1; // 0.5メートル未満の距離が0.5メートル未満の場合(距離= 0){Servo.Write(50);遅延(3000); {servo.write(160)} 60ミリ秒待つのを待つ(60)。 }このプログラムは、特にサーボ型サーボを使用する場合、および距離計の感度を使用する場合、回転角を補正することができます。ウィザードはデザインをチェックします。
それからそれはほとんど改造をして再びチェックします。
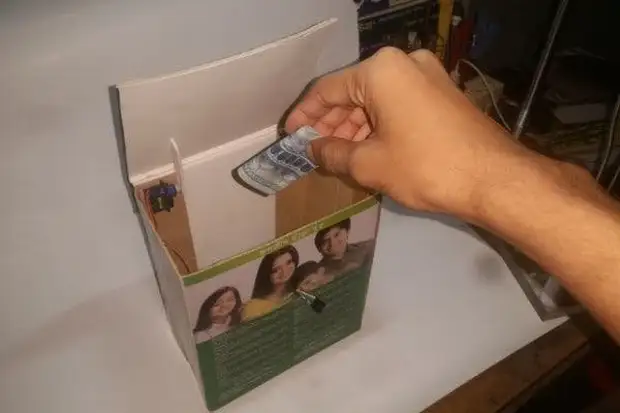
ハードウェアとソフトウェアの一部を交換すると、セルフシフトテーブルボックスを入手できます。