Bagaimana dengan membuat pengumpan untuk membuat tangan Anda sendiri? Tetapi pengumpannya tidak sederhana, tapi ... Yah, secara umum, itu tidak mudah.


Mungkin diperlukan
Set 12 chisers untuk benang kayu (Aliexpress)
DIY Set untuk Membuat Jam Elektronik (Aliexpress
Alat berkualitas tinggi untuk menghilangkan isolasi dengan kabel (Aliexpress)
Kunci Elektronik RC-522 untuk Arduino (Aliexpress)
Film karbon (Aliexpress)
Kadang-kadang terjadi bahwa orang-orang karena tidak peduli bagaimana alasan diperlukan untuk meninggalkan rumah mereka untuk sementara waktu. Sementara itu, hewan peliharaan tetap ada di rumah untuk mengantisipasi kembalinya pemiliknya. Tetapi mereka perlu memberi makan, dan itu menjadi masalah.
AlexGyver Master-Homeman (YouTube Channel "Alexgyver), muncul dari bahan-bahan yang tersedia, secara harfiah dari barang-barang rumah tangga, serta dari komponen elektronik berbiaya rendah dengan aliexpress untuk membuat pengumpan otomatis yang keren, yang akan menyederhanakan tugas bagi mereka yang akan melakukannya Terkadang pergi mengunjungi Anda dan mengunjungi hewan peliharaan Anda.
Pada awalnya, penulis ingin mencetak pengumpan untuk printer 3D dan membuat sistem kendalinya untuk itu, karena segala sesuatu yang ditemukan di hapus web World Wide Web, tetapi kemudian diputuskan untuk membuat dasar pengumpan dari Santeh .
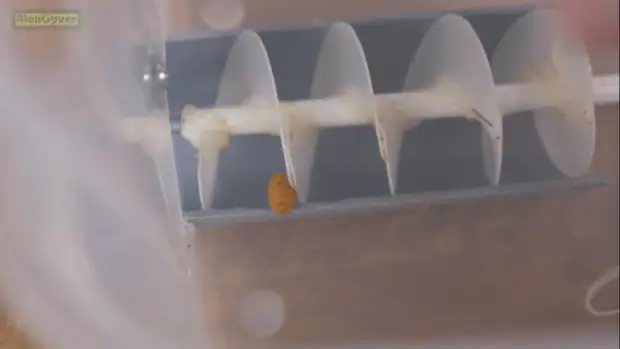
Kami akan melakukan pengumpan dengan bunker, umpan dari mana disajikan dengan bantuan teknologi kuno - sekrup Archimedian, atau auger, seperti yang disebut pada zaman kita. Konstruksi direncanakan sekitar itu, sesuatu seperti penggiling daging :

Tetapi bereksperimen dengan pakan pakan sekrup, penulis menghadapi sejumlah masalah yang menyebabkan kemacetan yang kuat dari pakan dalam desain semacam ini. Oleh karena itu, desain dengan sekrup terbuka dipilih.
Setelah menghabiskan waktu tertentu pada berbagai jenis eksperimen, penulis sampai pada kesimpulan berikut:
1. Jika auger berada di dalam bunker, maka itu harus terletak di bagian bawah pipa dengan diameter yang sama, jika tidak, dengan probabilitas 100%, mendorong potongan lateral.
2. Auger harus halus, jika tidak kemacetan jenis ini dapat terjadi.
3. Bagian belakang harus ditutup, jika tidak ujung auger kembali mendorong.
4. Jika auger adalah satu tangan, maka antara ujung dan output dari bunker harus memiliki jarak yang sedikit lebih besar daripada ukuran partikel pakan terbesar.
5. ujung depan harus diikat ke arah radial, jika tidak semuanya akan macet.
Untuk mengulangi proyek ini, Anda akan membutuhkan:
- Kotak dari fixprass;
- Pipa selokan ke-50;
- Untuk pembuatan auger akan membutuhkan tabung PVC dengan diameter 7 mm dan folder keras untuk kertas atau plastik tipis lainnya;
- Encoder;
- Arduino nano;
- Motor Cina dengan gearbox;
- Berkendara untuk mengontrol motor;
- tombol untuk kontrol;
- Pengisi daya dari smartphone.
Hal pertama yang kita potong lingkaran dengan diameter 48 mm. Kami akan membutuhkan 4 potong lingkaran seperti itu.
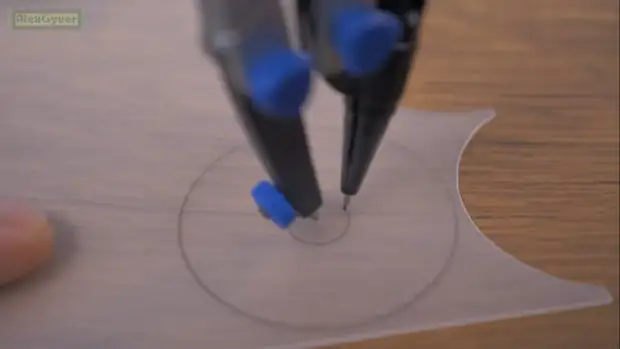
Di tengah detail yang dihasilkan, perlu untuk membuat lubang dengan diameter 10 mm. Semua dimensi diperoleh dengan coba-coba.
Panaskan bagian kosong plastik menggunakan korek api dan kami berbelok. Ini akan membantu kita dalam perakitan lebih lanjut.

Lem pada tahap ini tidak akan digunakan, sambungkan koil dengan stapler. Di masa depan, usaha konstruksi.

Selanjutnya, kami membersihkan dan menurunkan permukaan, dan kami ambil ujung depan dengan bantuan pistol termoklaural, dan kemudian belakang, pra-memperketat helix. Lem tentu bukan makanan, tetapi sebagai penulis meyakinkan, jelas tidak beracun.

Kemudian potong cincin ukurannya sedikit lebih kecil dan tongkat dari belakang. Semua menyelaraskan dan menyingkirkan langkah-langkah di seluruh permukaan depan.
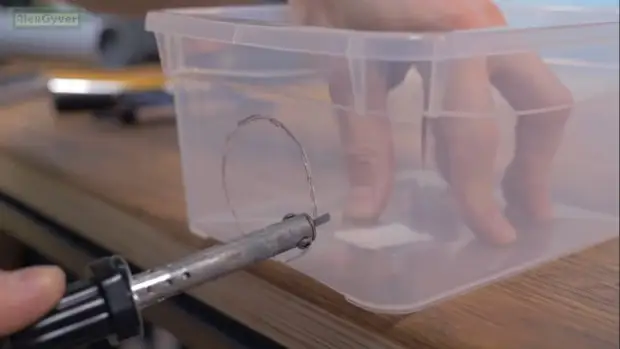
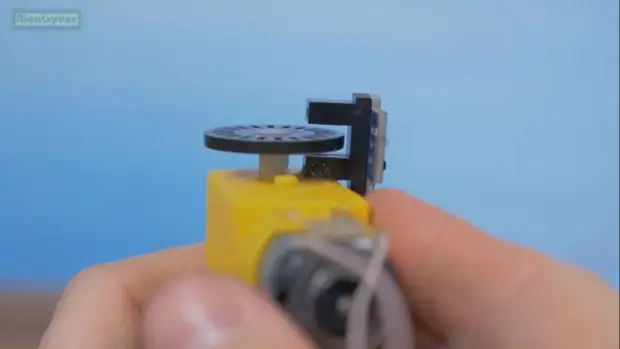
Semuanya, auger sudah siap, maka kami akan bekerja dengan pipa. Dari sana kita akan menghasilkan bunker. Hal pertama dalam bunker masa depan perlu membuat lubang.
Selanjutnya, retret milimeter 5 dari tepi bunker dan buat markup berikut:
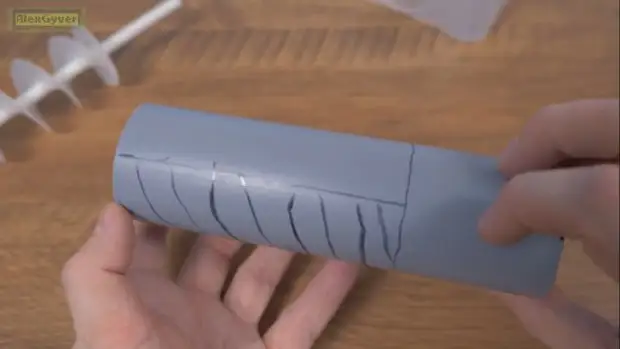
Bagian ini perlu ditebang. Auger akan digerakkan dengan cara motor Cina dengan gearbox:

Mounting motor akan sedekat mungkin hingga satu abad, karena ada sedikit ruang di bunker. Gabungkan dengan lembut auger dengan poros, pemantik plastik sedikit dipanaskan.

Sebenarnya, pipa mengambil bentuk poros. Anda dapat memanaskan dan mengkonfigurasi penyelarasan.
Langkah selanjutnya di pipa harus dipotong di bawah motor.

Klip besar akan tampil sebagai dukungan anterior.

Yah, sesuatu seperti ini. Hampir siap mekanisme pemberian makan kami, dan yang paling penting, pada tahap ini, Anda dapat memastikan kinerja penuh.

Sekarang mari kita beralih ke bagian elektronik. Poros dua sisi diperlukan untuk mengamankan encoder di atasnya.
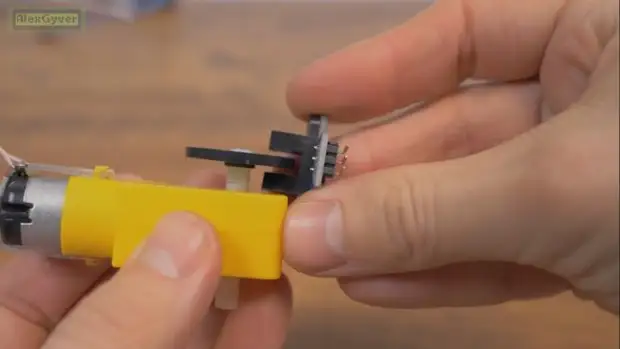
Encoder akan memungkinkan Anda untuk mengikuti twist poros, yaitu sekrup, yang akan membuatnya sangat tepat untuk dosis porsi umpan. Ini juga akan memungkinkan untuk memantau kecepatan rotasi poros dan mengangkat tegangan pada motor jika beban pada auger besar dan omset. Dengan demikian, kami terlindungi dari macetisme, yaitu, paling ketakutan dalam pengumpan otomatis.
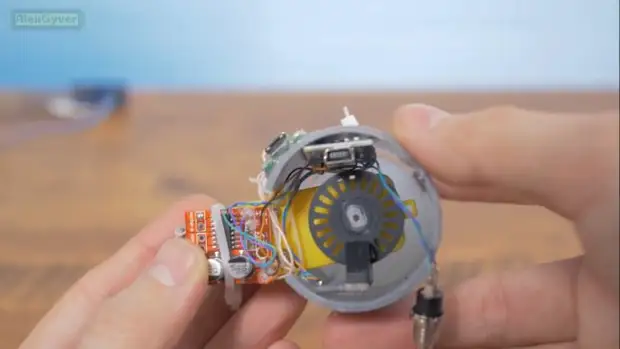
Kelola seluruh sistem akan menjadi platform Arduino Nano.
Anda membutuhkan pengemudi untuk mengendalikan motor. Pada prinsipnya, sangat mungkin dilakukan tanpa transistor, tetapi untuk satu mode yang agak menarik kita perlu mengubah motor ke arah yang berlawanan, dan untuk ini Anda sudah membutuhkan driver.
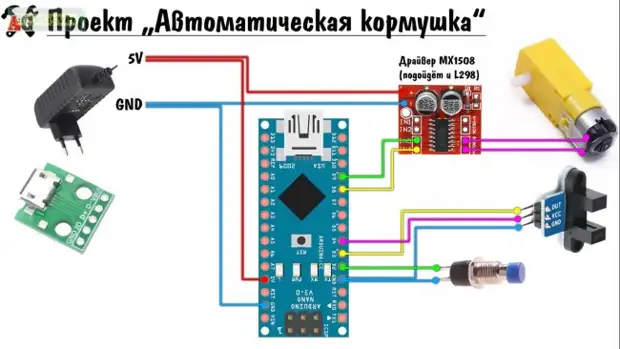
Skema koneksi terlihat seperti ini:
Kami mulai merakit. Encoder diikat pada superclauses. Anda dapat meningkatkan superclay dengan soda. Dengan bantuan penjepit dengan andal memperbaiki motor.

Kami menghubungkan komponen elektronik dengan kabel dan crepim pada pipa.
Selanjutnya, hubungkan Arduino ke komputer, buka halaman proyek dan ayunkan firmware.

Kemudian buka file firmware, dan kami melihat pengaturannya. Lihat lebih dalam aslinya Video Penulis:
Setelah mengatur pengaturan, klik tombol "Unduh" dan kode dimuat ke mikrokontroler.
Semua akhirnya diikat dan kami melakukan lubang yang diperlukan di bawah mini USB untuk mengunduh dan Micro USB untuk daya. Menempatkan skema di Mini USB Arduino tidak mungkin, karena motor mungkin memerlukan hingga 800 mA di bawah beban dan sekering akan terbang di papan tulis.
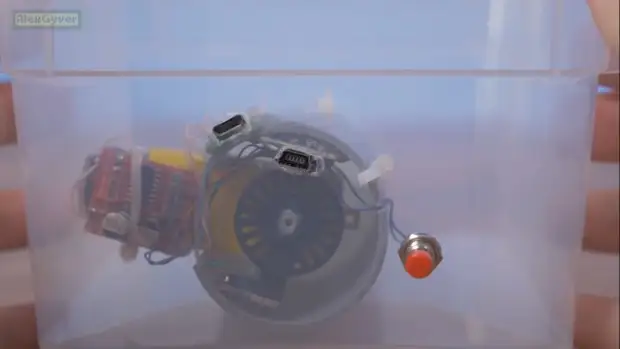
Kami menambahkan lereng sehingga umpan sepenuhnya diproduksi.

Sekarang tentang cara kerjanya. Kami memiliki tombol. Jika Anda mengkliknya - sistem akan ketinggalan waktu tunggu dan berikan porsi umpan. Pakan berikutnya akan secara otomatis terjadi setelah waktu yang ditentukan dan kemudian dalam lingkaran.


Untuk mengkonfigurasi ukuran porsi, klik dan tahan tombol. Tahan sampai kebutuhan untuk pakan diberi skor. Setelah tombol dirilis, timer akan diatur ulang, dan ukuran porsi yang diinstal akan direkam dalam memori dan tidak akan habis saat reboot.


Seperti disebutkan di atas, sistem ini mampu mengendalikan tegangan pada motor tergantung pada kecepatan rotasi, dan jika beban tiba-tiba meningkat - daya tinggi dan pakan pakan berlanjut pada motor. Juga, proyek menyediakan mode rekrutmen. Jika sistem memahami bahwa daya pada motor akan sudah diberikan maksimal, tetapi auger berdiri di tempat - itu berarti benar-benar macet. Sistem ini membuat jangka pendek (waktu dapat dikonfigurasi dalam firmware) brengsek simpul di arah yang berlawanan, dan kemudian melanjutkan pengikatan pakan.
Itu saja. Terima kasih atas perhatian Anda. Untuk pertemuan baru!