घंटे कैसे काम करें
अंततः मैंने Arduino से निपटने का फैसला किया, जिसके परिणामस्वरूप मैंने अपनी पहली परियोजना बनाई: पूरी तरह से यांत्रिक डिजिटल घड़ी।

अवयव
इलेक्ट्रॉनिक्स:- (1) Arduino नैनो।
- (2) पीसीए 9 685, 16-चैनल 12-बिट पीडब्लूएम सर्वोमोटर ड्राइवर।
- (1) डीएस 3231, रीयल टाइम क्लॉक (आरटीसी)।
- (1) टीटीपी 223 बी, टच स्विच।
- (33) एसजी 9 0 सर्वोमोटर।
- (2) 20 किलो शक्तिशाली सर्वोमोटर्स।
- (1) ग्रीष्मकालीन सिग्नल स्विच।
- (1) 12 वी 6 ए बिजली की आपूर्ति।
सामग्री:
- अखरोट प्लाईवुड 3 मिमी।
- नट लिबास।
- Plexiglas 3 मिमी।
- कार्बन स्टील का तार।
- शिकंजा।
- स्थायी चुंबक।
- धातु की गेंदें 6 मिमी।
उपकरण:
- लेजर कटर Glowforge।
- विभिन्न उपकरण।
चरण 1: योजना और कोड
डिवाइस का योजनाबद्ध आरेख बहुत आसान है। सब कुछ संपर्क एसडीए, एससीएल, पृथ्वी और वी + के माध्यम से सबकुछ से जुड़ता है।
निम्नलिखित सिद्धांतों में संपूर्ण कार्य के रूप में कोड:
- प्रत्येक मोटर को एक या दो पीसीए 9 685 बोर्डों द्वारा नियंत्रित किया जाता है। प्रत्येक अंक में 7 सेगमेंट होते हैं - यह मिनटों और 14 मिनट के लिए 14 सर्वोमोटर्स निकलता है। आवास घूर्णन करने वाले दो और शक्तिशाली इंजन हैं, 4 मंच को बढ़ाते हैं, और कोलन के लिए 1।
- समय वास्तविक समय चिप से लिया जाता है।
- मैं घड़ी प्रारूपों (12/24 घंटे) को स्विच करने में सक्षम होने के लिए सर्किट में एक स्पर्श स्विच चालू कर दिया।
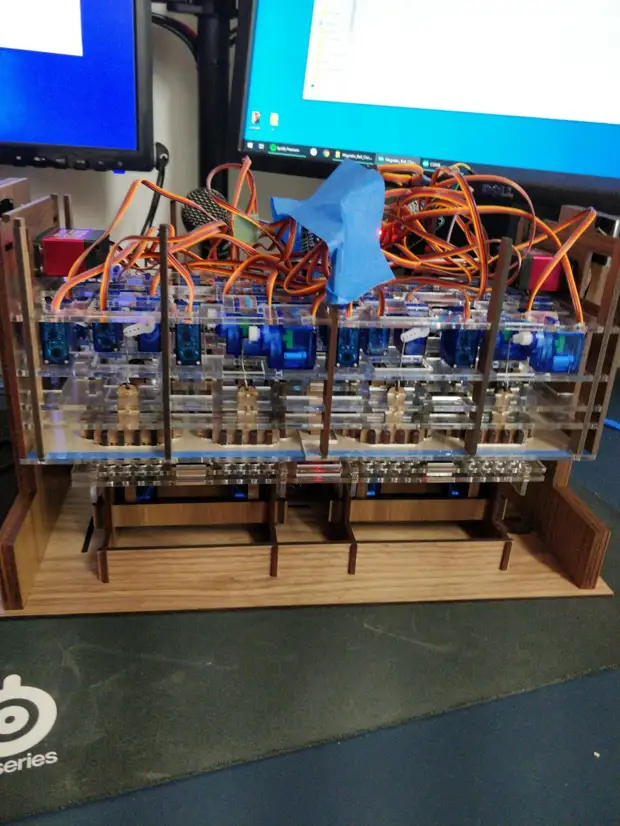
चरण 2: प्रोटोटाइपिंग

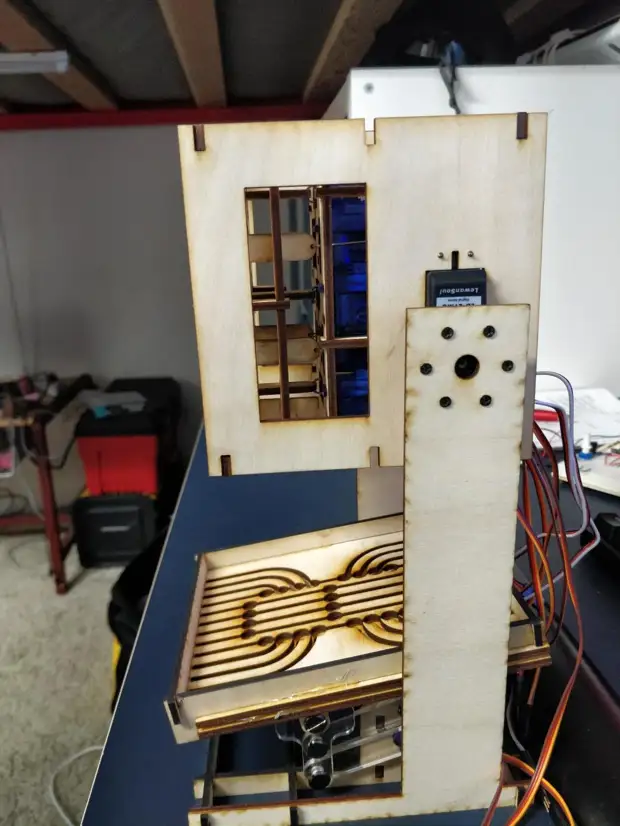
संख्या और संख्या
प्रत्येक संख्या में 7 खंड होते हैं। प्रत्येक खंड को सर्वो द्वारा नियंत्रित किया जाता है। सबसे कठिन कार्यों में से एक सर्वोमोटर्स को रखना था ताकि घड़ी के कुल आकार को कम किया जा सके। इसने कंप्यूटर पर डिजाइन की मदद की।मैंने एकमात्र आंकड़ा शुरू किया। फोटो उठाने की तंत्र में पटरियों को दिखाता है जिसके लिए गेंदों को प्रारंभिक योजना पर स्थानांतरित किया जाना चाहिए। इसके अलावा, मैं चाहता था, जब सभी गेंदों को बदलकर सभी गेंदें गिर गईं - लेकिन ऐसी प्रणाली बहुत जटिल थी। और ठीक है, क्योंकि घड़ी और अब काम काफी जोर से है - और हर मिनट गिरने से सैकड़ों गेंदें निश्चित रूप से परेशान होने लगती हैं।
चरण 3: डिजाइन
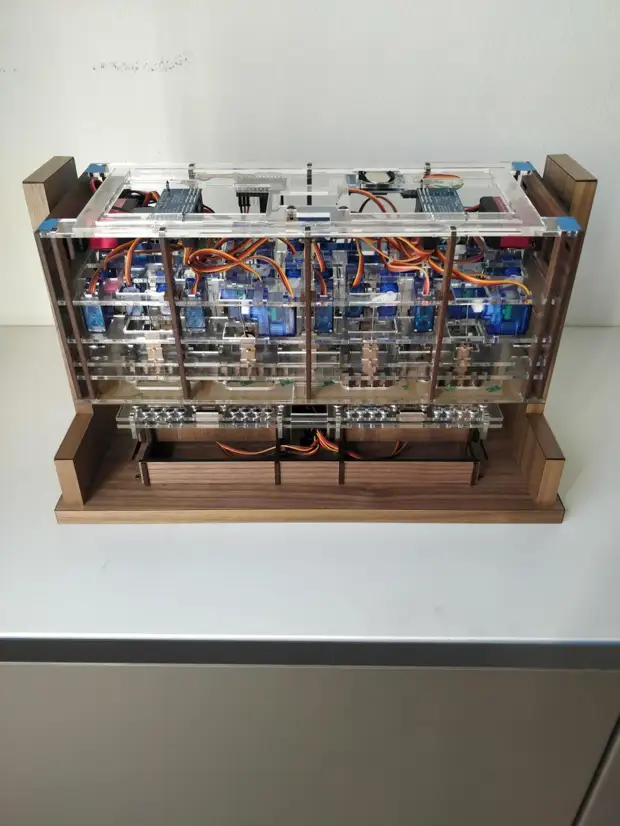

आवास का शीर्ष
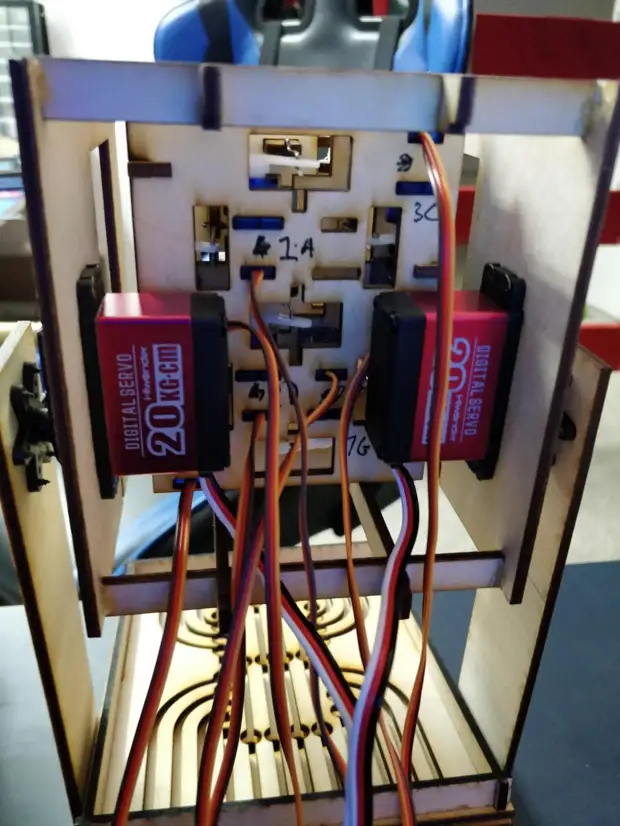
सर्वोमोटर्स कनेक्टिंग तारों से जुड़े होते हैं। एक तार पर, यह संख्याओं के प्रत्येक खंड में जाता है, और प्रत्येक खंड में चार चुंबक होते हैं। आपको बस 28 बार दोहराने की जरूरत है।पहली परत चुंबक है, दूसरा सर्वोमोटर्स, तीसरा इलेक्ट्रॉनिक्स रखता है, और फिर पिछली दीवार जाती है। हां, शायद लेआउट बहुत तंग हो गया - क्या करना है।
पक्ष की दीवारों पर, दो 20 किलो मोटर्स तय किए जाते हैं, पूरे शरीर को गेंदों को लोड करने और अनलोड करने के लिए घूर्णन करते हैं। वैसे, भविष्य में मैं एक परियोजना के लिए विभिन्न सामग्रियों का उपयोग नहीं करूंगा। मैं एक छोटे से लकड़ी के खत्म के साथ, ज्यादातर पारदर्शी के लिए घड़ी चाहता था। विभिन्न मोटाई की सामग्रियों के साथ काम करना, जो लेजर कटर में कट की विभिन्न मोटाई भी प्राप्त करता है, यह बहुत मुश्किल था।
लिफ्टिंग तंत्र (निचला भाग)
उठाने के तंत्र में 4 इंजन होते हैं ताकि प्लेटफॉर्म को बढ़ाने और कम करने में मदद मिल सके जहां स्टील की गेंद संख्याओं के खंडों के तहत बनाई गई हो। एक साधारण संचरण के माध्यम से वृद्धि की जाती है।
पैर
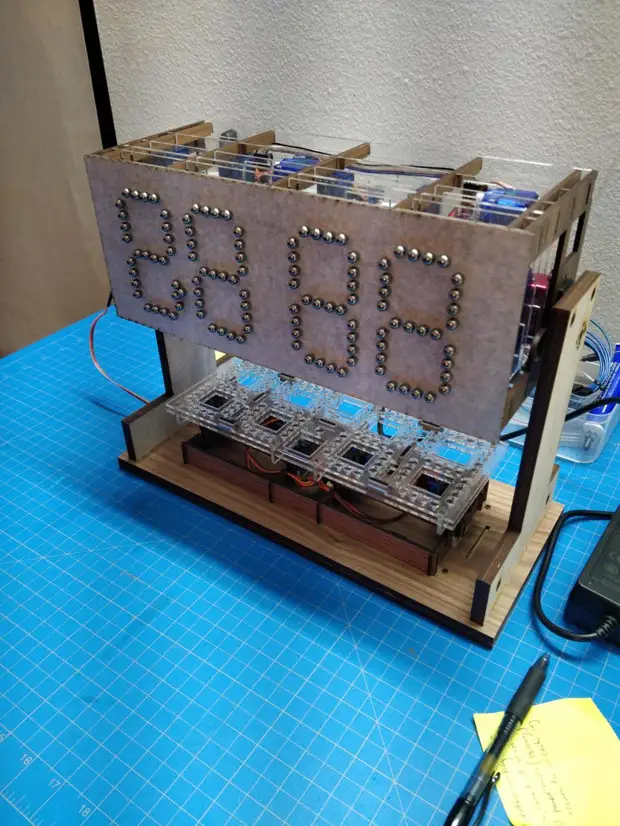
12 वी द्वारा संचालित आवास के नीचे के माध्यम से संचालित है। मैं तारों में से एक में तारों को अच्छी तरह से छिपाने में कामयाब रहा, ताकि तारों को वहां क्लैंप न हो।चरण 4: फिनिशिंग स्ट्रोक


डिजाइनिंग घंटे, मुझे लगातार एक डबल डिज़ाइन बनाने की आवश्यकता को याद किया गया। घड़ी के विकल्पों में से एक यह दिखता है कि वे पूरी तरह से लकड़ी से बने हैं। और यदि आप इन अस्तर को हटाते हैं, तो आप तंत्र के अंदर और संचालन देख सकते हैं। अब मैं समझता हूं कि वे मुझे ओवरले के साथ अधिक पसंद करते हैं, हालांकि, और उनके बिना परियोजना बहुत अच्छी लगती है।